|
I am a graduate student at University of Pennsylvania specializing in Robotics. I completed my undergraduate studies in Aerospace Engineering where I specialized in Computational Fluid Dynamics. My interests lie within the areas of Autonomous Exploration, Robot navigation, Simultaneous Localization and Mapping (SLAM), Computer Vision and Machine Learning. I am also a Student Researcher at the Kumar Robotics Lab at the University of Pennsylvania. I work in the field of Learning based Autonomous Exploration, and Applications of Deep Learning in Visual SLAM. Feel free to check out my Resume and drop me an e-mail if you want to chat with me! |

|
|
|
|
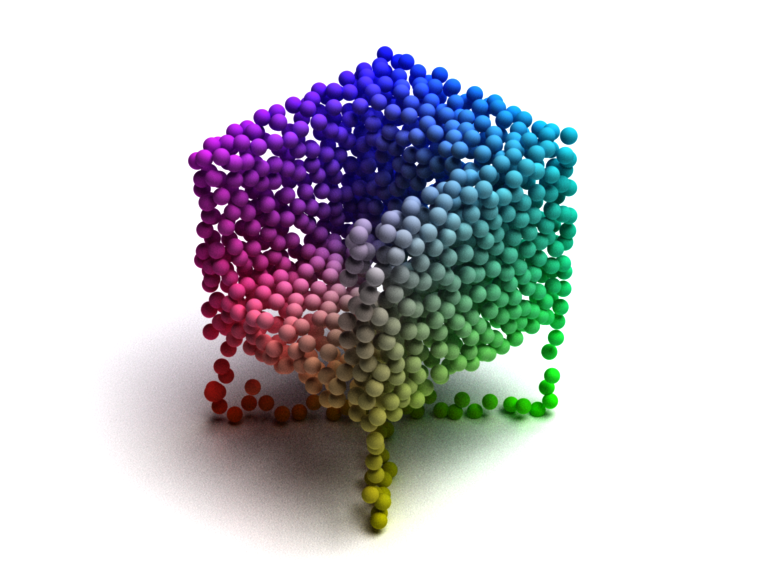
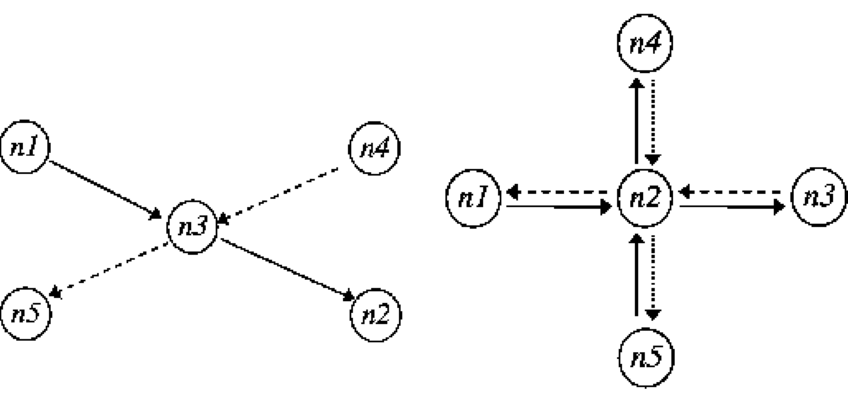
Athrva Pandhare Submitted to IROS, 2023 / Slides / Results Video Inducing a Locality Consistent Ordering using Hilbert Space filling curves to facilitate direct learning on Unordered sets. |
|
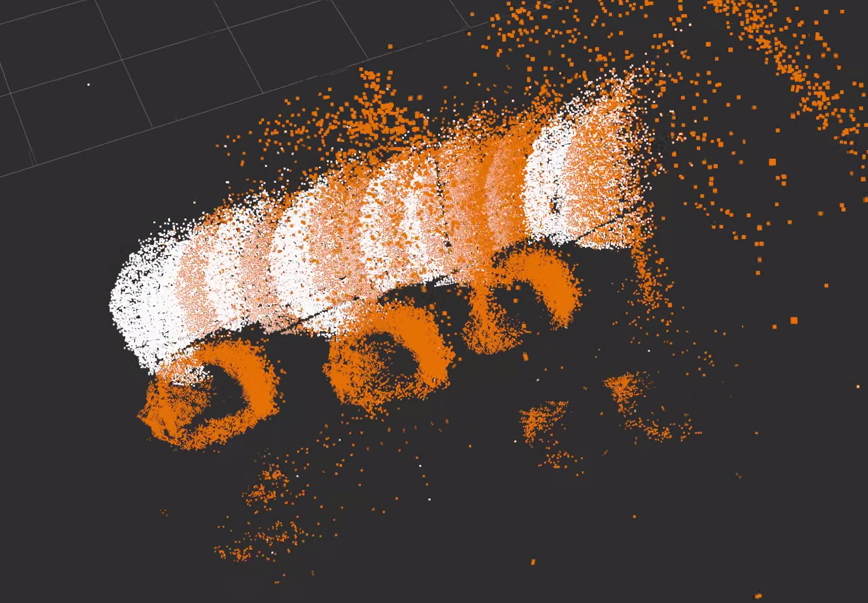
Research Intern, Kumar Robotics (PERCH Lab, University of Pennsylvania), Summer 2022 Details / Developed a Novel Algorithm for Clutter Removal from Egocentric Point Clouds. |
|
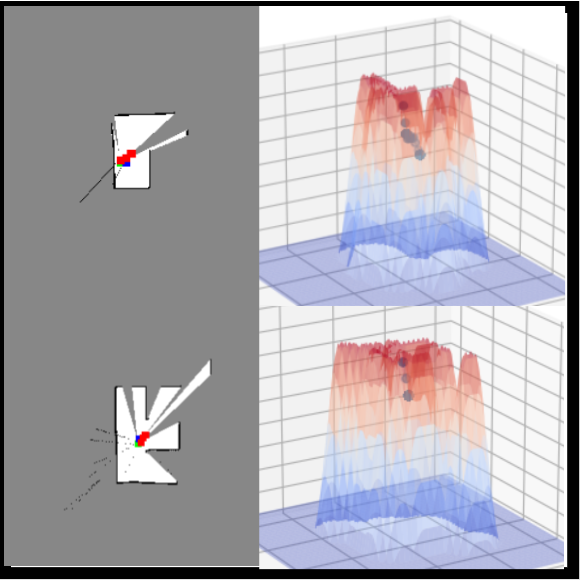
Research Intern, Kumar Robotics (PERCH Lab, University of Pennsylvania), Summer 2022 Details / Developed a Position Penalty APF for fast Path Planning in Indoor Environments |
|
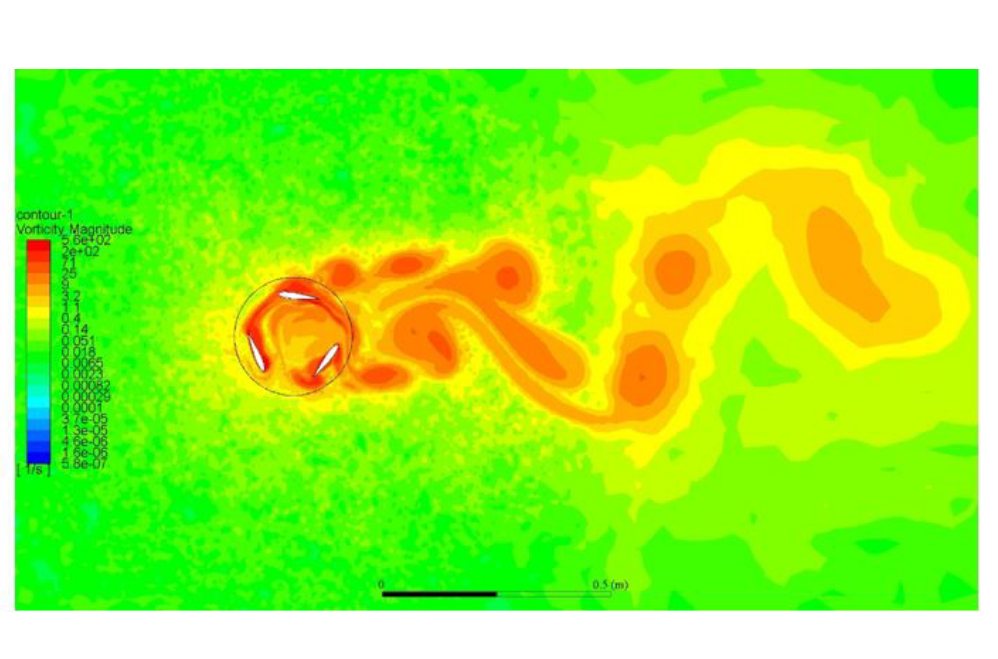
Athrva Pandhare, Arnab Paul, Senthilkumar Sundraraj Bachelor's Thesis, 2020 Manuscript / Code Developed Genetic Algorithms tailored for Airfoil Profile Optimization by maximizing Tangential force Coefficient |
|
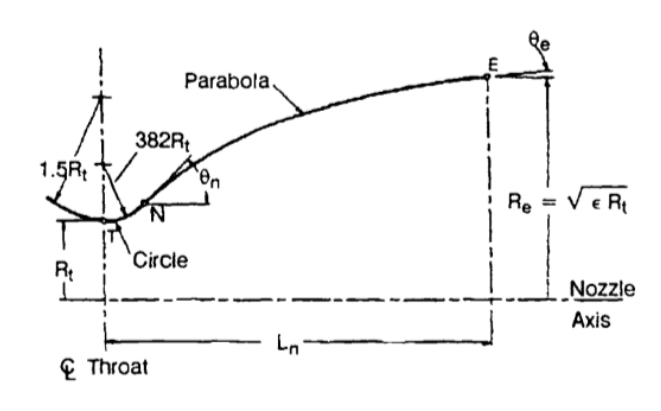
Athrva Pandhare, Abhishek Puri, Senthilkumar Sundraraj Bachelor's Independent Study, 2019 Manuscript / Developed a Partial-Slip Based formuation for modelling transition from continuum to rarefied flow regimes. |
|
|
|
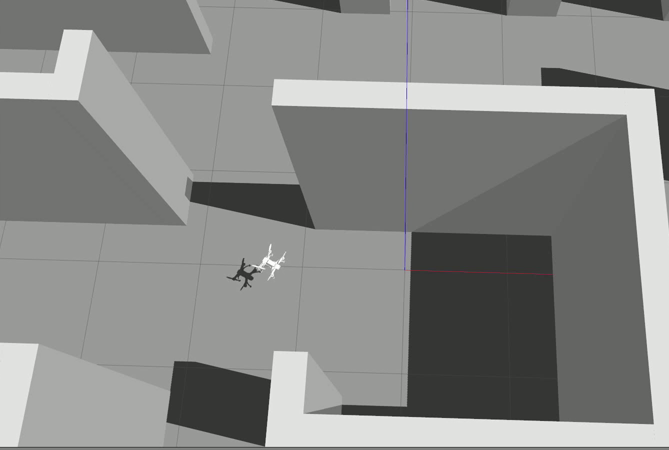
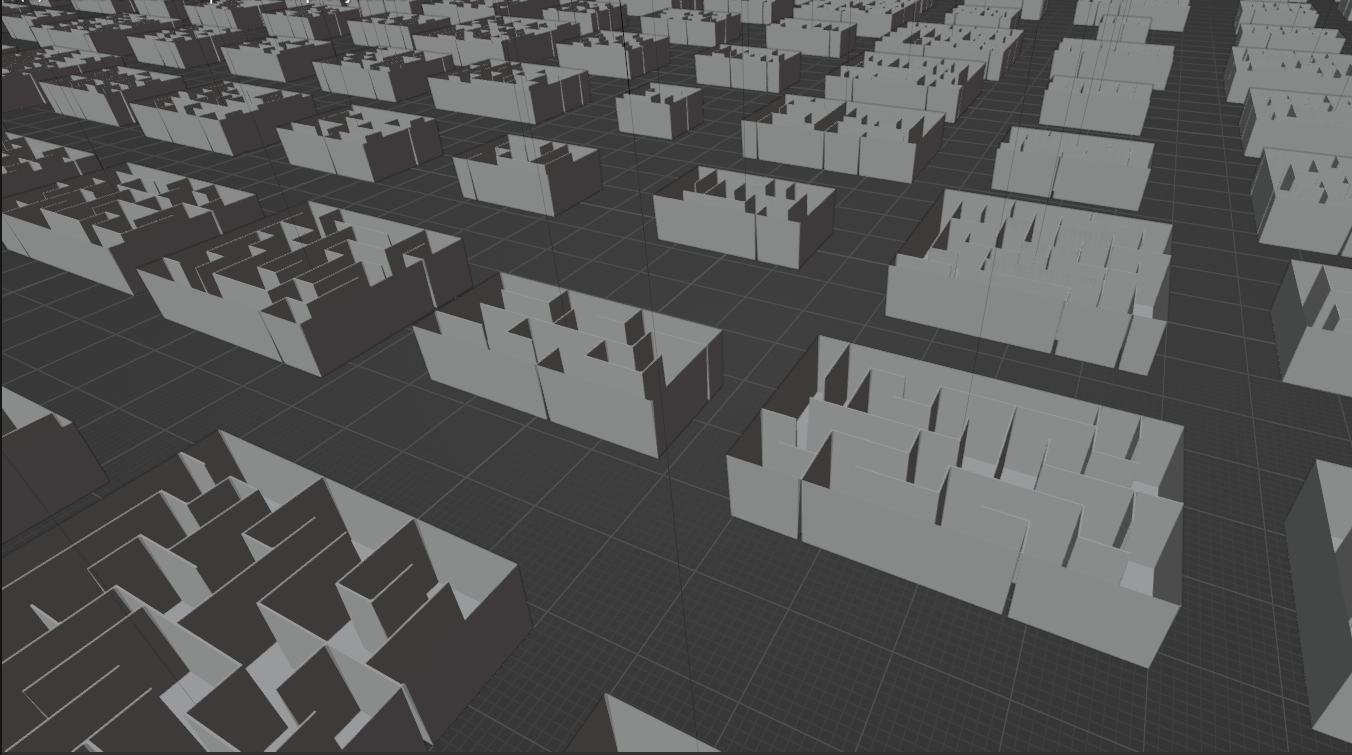
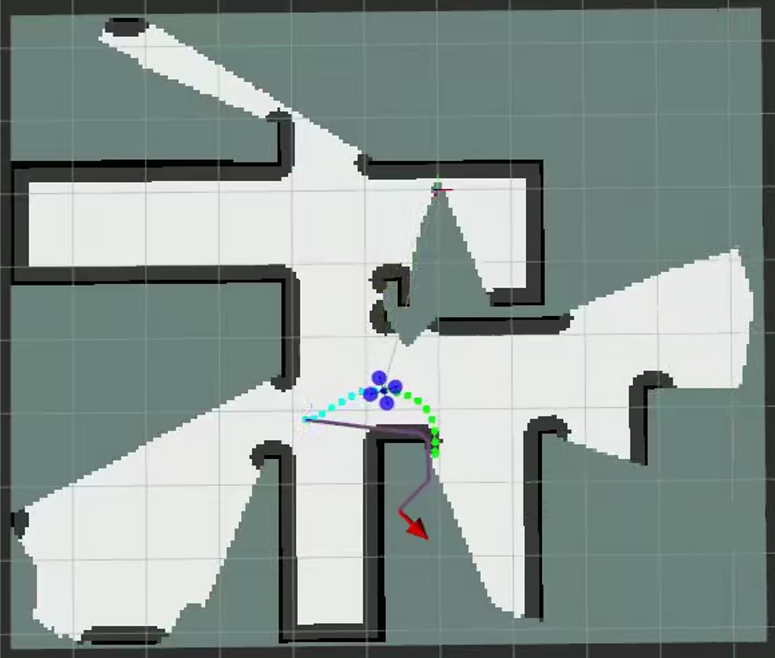
Research Intern, Kumar Robotics (PERCH Lab, University of Pennsylvania), Summer 2022 Details / Created Frontier Based Exploration algorithms for Autonomous Quadrotors in Indoor Environments |
|
Student Researcher, GRASP Lab, UPenn Video / Details Developed Direction Primitive based Reinforcement Learning models for Fast and Safe Autonomous Exploration |
|
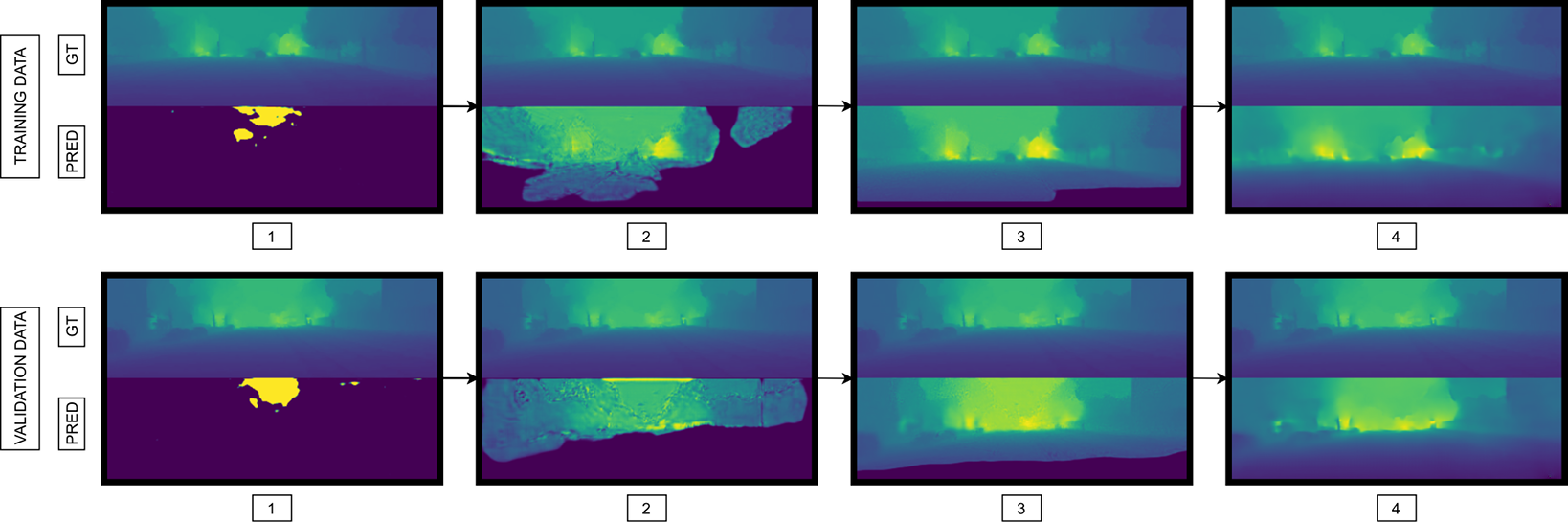
Final Project, Machine Learning Report / Code An implementation of pix2pix GAN for Monocular Depth Estimation on KITTI outdoor scene data. |
|
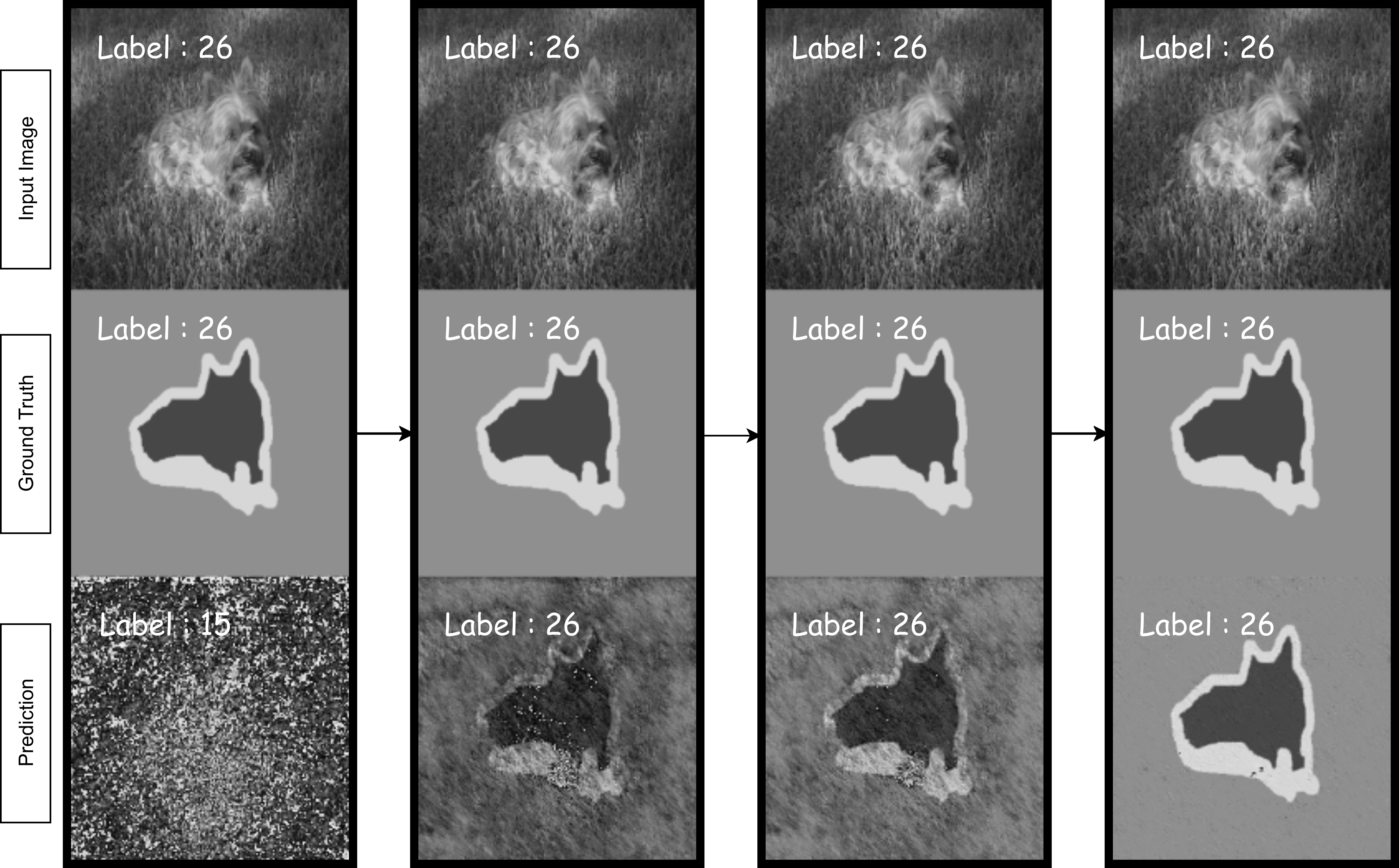
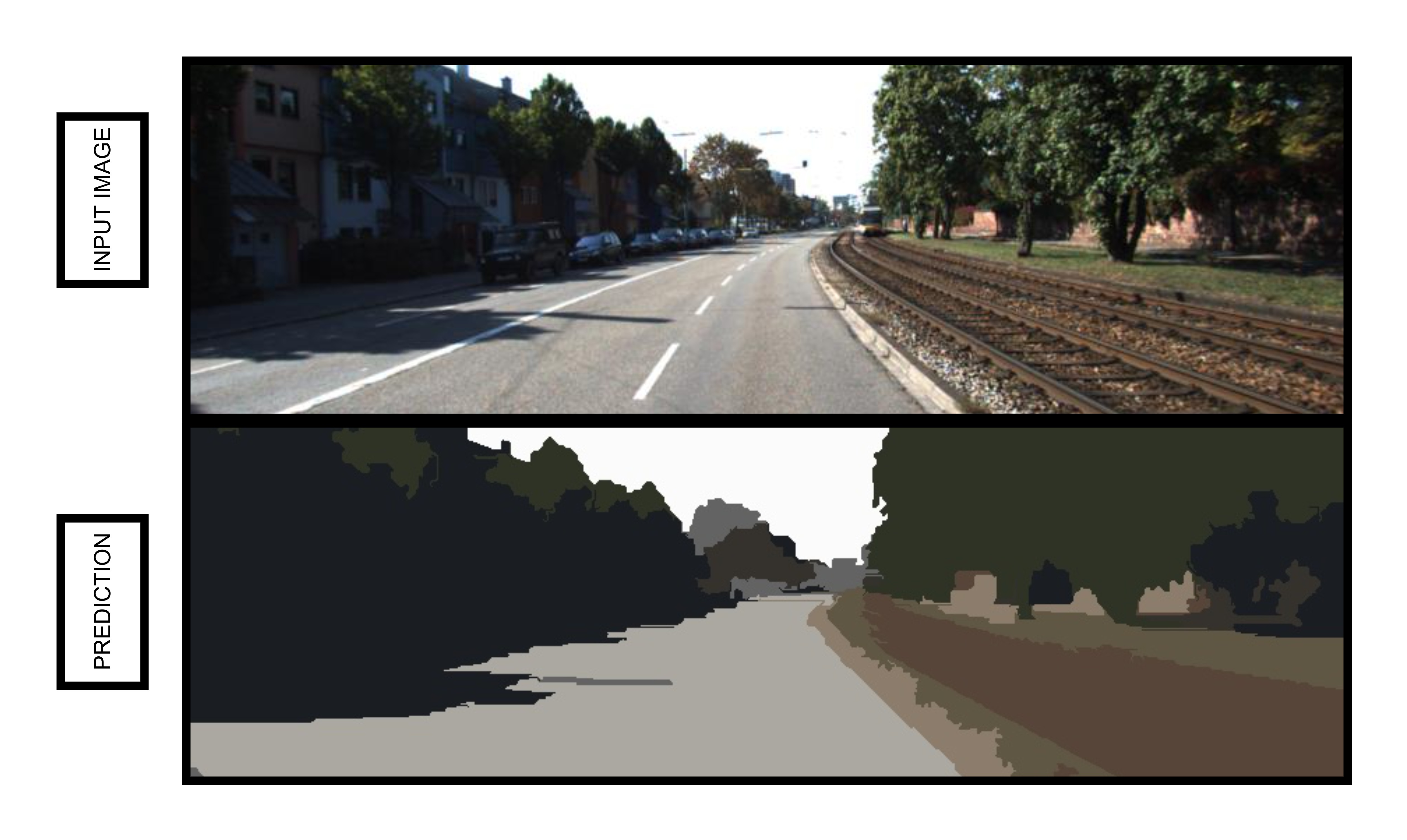
Final Project, Computer Vision and Computational Photography Video / Report / Details Attention UNet based segmentation with a Gradient Error minimization Loss and subsequent analysis of the Logits using Information criteria. |
|
Independent Research, Generative Deep Learning Video / Details Outdoor Scene Generation from Semantic Information using pix2pix GANs for a small set of outdoor Environments |
|
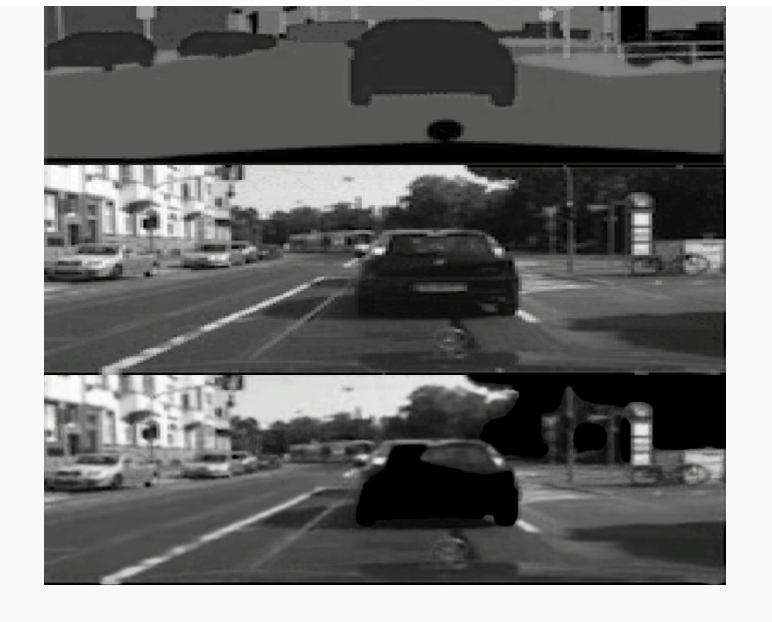
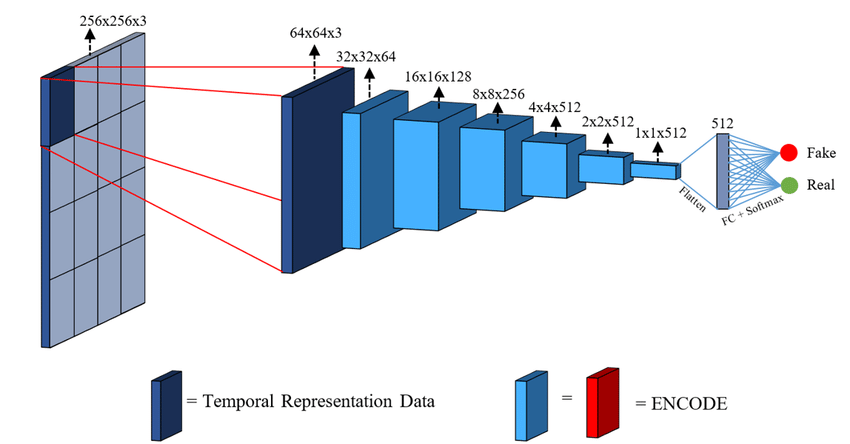
Independent Research, Unsupervised Generative Deep Learning Details / Re-implementation of a Research paper on Unsupervised Image segmentation. |
|
Independent Research, Generative Deep Learning Details / Treating Semantic Segmentation as an Image Generation Task. |
|
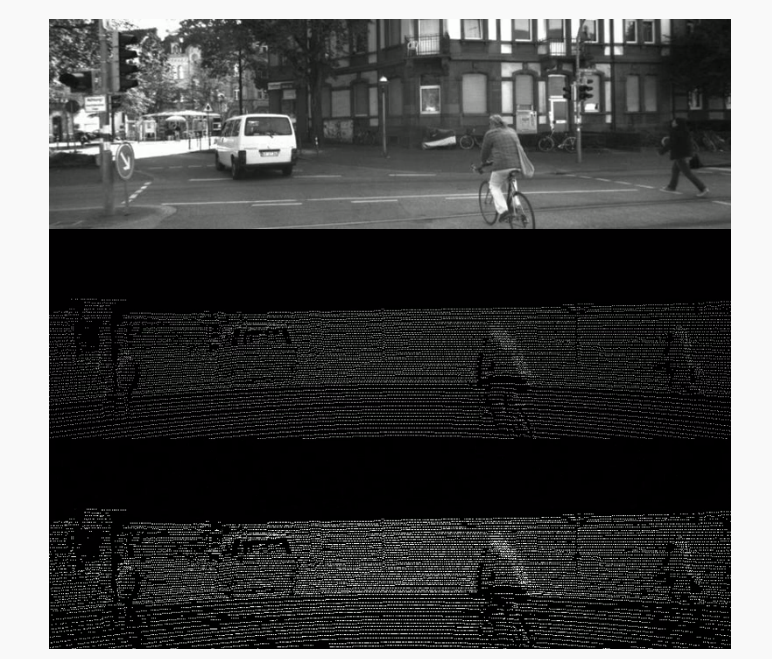
Independent Research, Generative Deep Learning Details / Prediction Point Cloud Spherical Projection from Images in the KITTI raw dataset |
|
Website adapted from Jon Barron . |