I completed this project during my Researh assistantship at the Kumar Robotics lab at UPenn
We developed Frontier Based Exploration for Small Agile Quadrotors.
These Quadrotors are placed in an unknown indoor environment (commercial spaces) and are then required to explore these spaces to create a robust 2D occupancy grid of these environments.
Frontier Based exploration, requires the maintainence of a 2D occupancy grid representation of the environment (alternately a 3D voxel grid)
Frontiers can then be defined as the boundaries between the explored (known) areas of the map and the unexplored (uncertain) areas of the map
At every exploration step we rank these frontiers based on some heuristic and navigate towards the larges frontier.
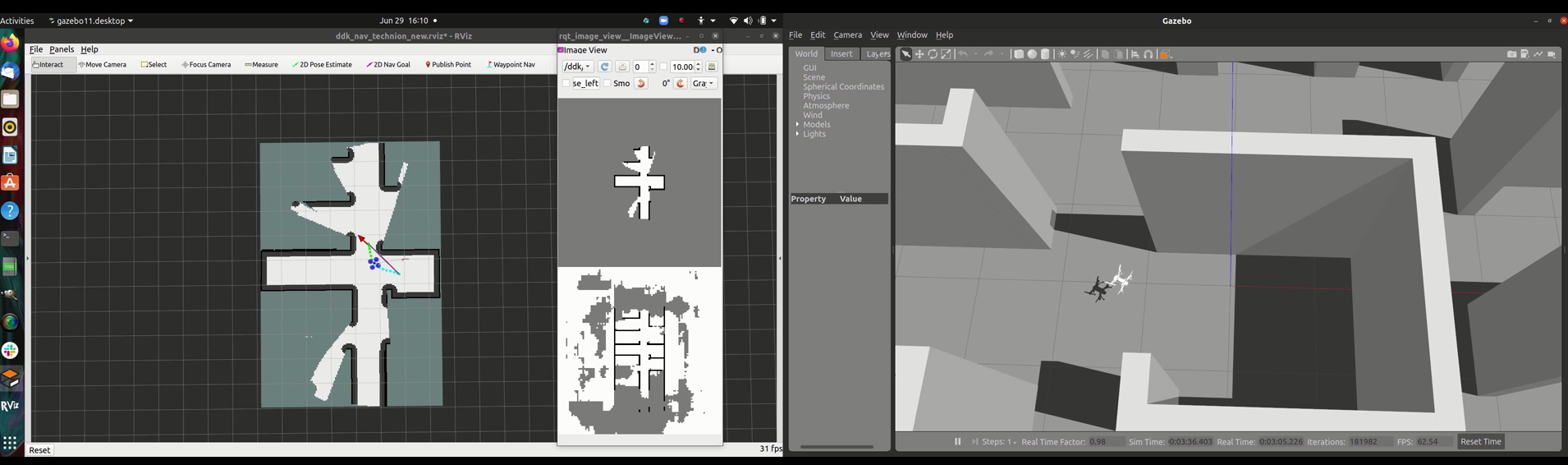
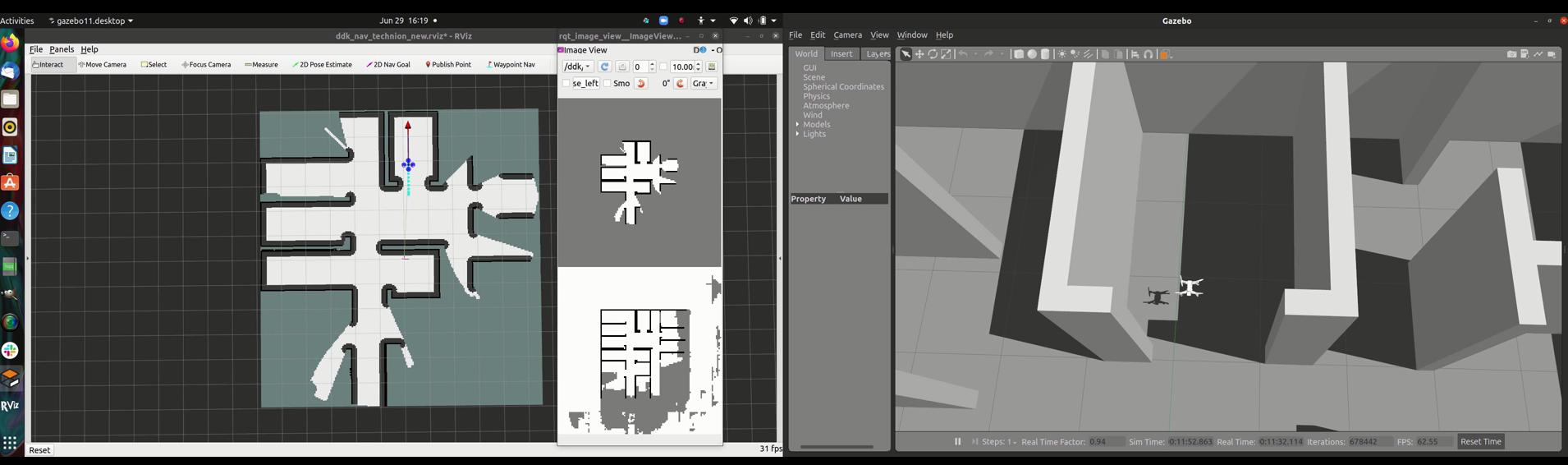
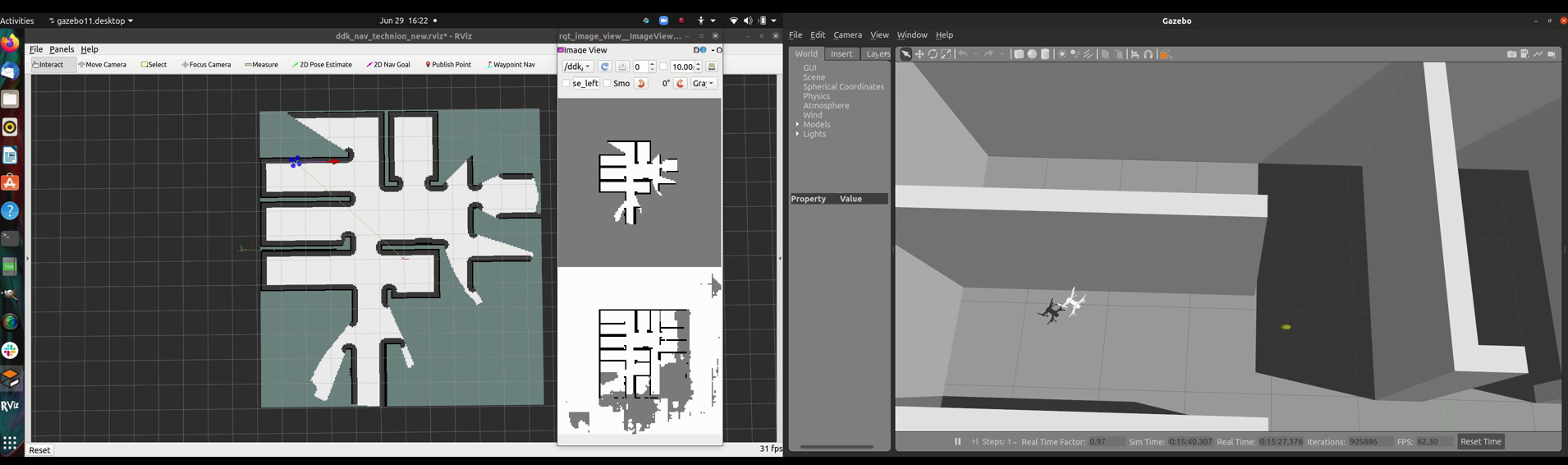
Folowing are some of the videos of the system in simulation.
Media:
Visualization of the Exploration Process

Code
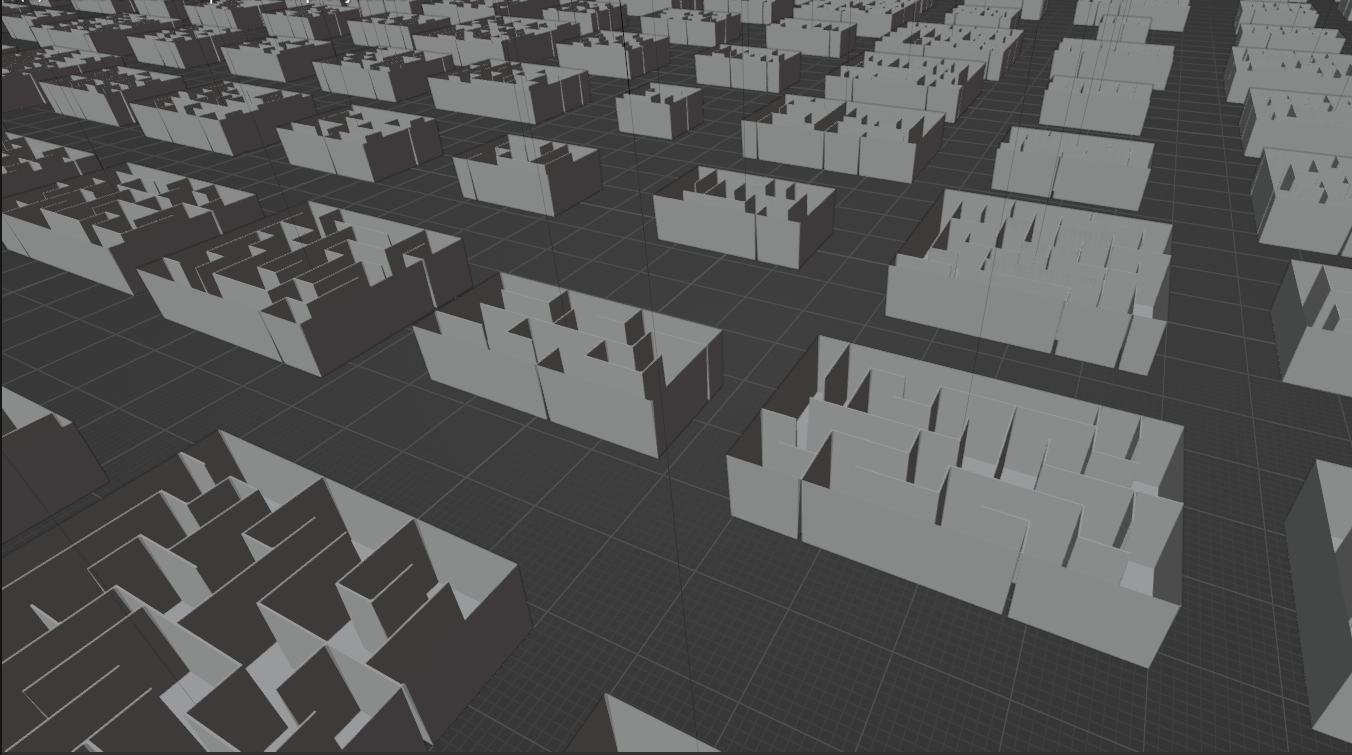
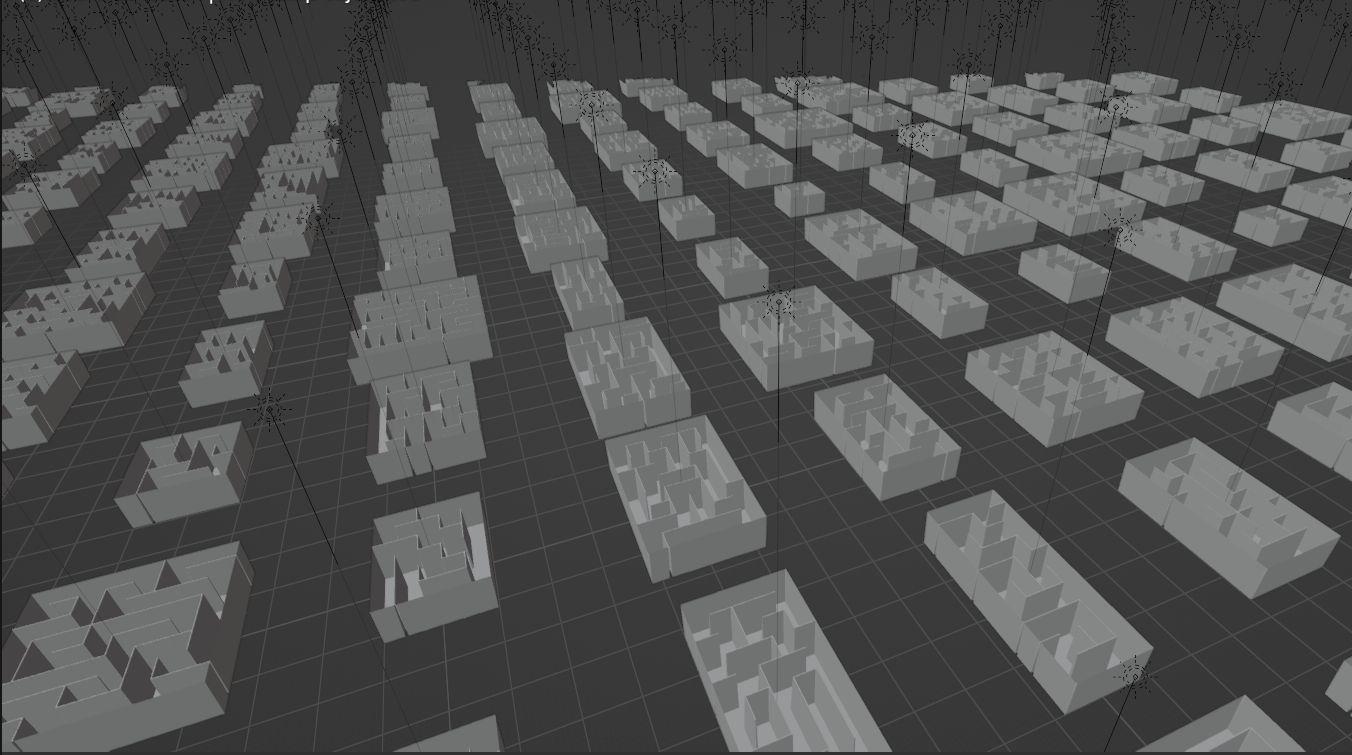
Distributed Environment Setup
We used this framework to generate a dataset of partial occupancy grids during exploration for another learning based project
For this I adapted the Frontier Based Exploration code to run on the MORSE Simulator
Following figures show this environment and simultaneous independent atrvs exploring their surroundings.