This Project was completed as part of my Research in the Kumar Robotics Lab at UPenn
In this project I was required to develop an algorithm for clutter removal from egcentric point clouds during registration
This problem becomes especially difficult since the clutter (furniture etc) needs to be indentified from ego scans which are often partial scans not containing full objects
The resulting algorithm identifies clutter objects in point clouds and removes with minimal impact on the speed of registration
This algorithm is pending submission to IROS 2023
We use purely geometric arguments in the development of this algorithm, pruning is done by approximation statistical tests in higher dimensions
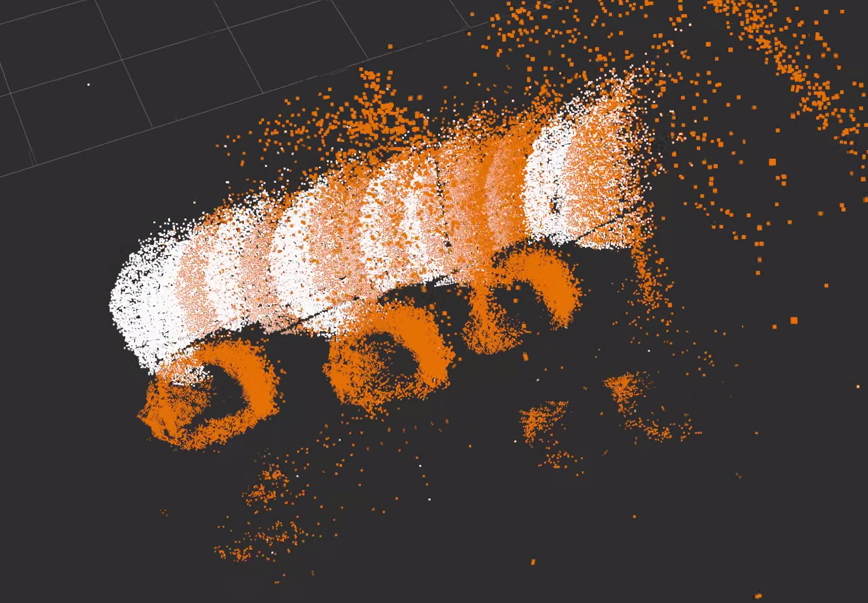
Sample Figures and a Video of the Process